
Page 315 - Modern Control Systems
P. 315
Problems 289
where £ = 0.707 and (o„ = 15. The transfer function R(s) = 30/skm/hr and that K eK x » 1. When
of the power amplifier is approximately Kg/Ki = 2, what percent grade Ad would cause the
automobile to stall?
k
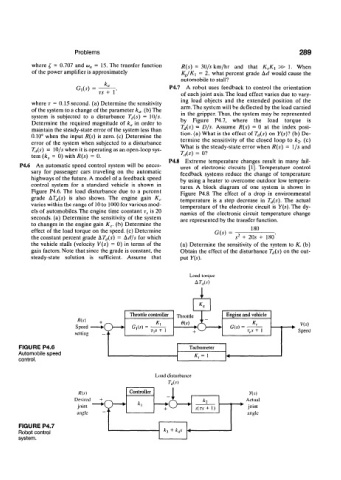
Gi(-v) P4.7 A robot uses feedback to control the orientation
TS + r of each joint axis. The load effect varies due to vary-
ing load objects and the extended position of the
where T = 0.15 second, (a) Determine the sensitivity
of the system to a change of the parameter k a. (b) The arm.The system will be deflected by the load carried
system
gripper. Thus, the
system is subjected to a disturbance T d(s) = 10/s. in the Figure P4.7, where the may be represented
by
is
load
torque
Determine the required magnitude of k u in order to Tj(s) = D/s. Assume R(s) = 0 at the index posi-
maintain the steady-state error of the system less than tion. (a) What is the effect of 7 ^ ) on K(s)? (b) De-
0.10° when the input R(s) is zero, (c) Determine the termine the sensitivity of the closed loop to k 2- (c)
error of the system when subjected to a disturbance
T,j(s) = 10/s when it is operating as an open-loop sys- What is the steady-state error when R(s) = l/s and
= 0) with R(s) = 0. T d(s) = 0?
tem (k s
P4.8 Extreme temperature changes result in many fail-
P4.6 An automatic speed control system will be neces- ures of electronic circuits [1J. Temperature control
sary for passenger cars traveling on the automatic feedback systems reduce the change of temperature
highways of the future. A model of a feedback speed by using a heater to overcome outdoor low tempera-
control system for a standard vehicle is shown in tures. A block diagram of one system is shown in
Figure P4.6. The load disturbance due to a percent Figure P4.8. The effect of a drop in environmental
grade A.T,j(s) is also shown. The engine gain K t. temperature is a step decrease in T d(s). The actual
varies within the range of 10 to 1000 for various mod- temperature of the electronic circuit is Y(s). The dy-
els of automobiles. The engine time constant r e is 20 namics of the electronic circuit temperature change
seconds, (a) Determine the sensitivity of the system are represented by the transfer function.
to changes in the engine gain K c. (b) Determine the
effect of the load torque on the speed, (c) Determine
G(S) = -i: .
the constant percent grade &T d(s) = Ad/s for which s 2 + 20s + 180
the vehicle stalls (velocity V(s) = 0) in terms of the (a) Determine the sensitivity of the system to K. (b)
gain factors. Note that since the grade is constant, the Obtain the effect of the disturbance T,i(s) on the out-
steady-state solution is sufficient. Assume that
put Y(s).
Load torque
A M
Throttle controller Engine and vehicle
R(s) ATi K.
Speed O • G,(.v) = G(s) = V(s)
setting T).V + 1 T„S + 1 Speed
FIGURE P4.6 Tachometer
Automobile speed K,= \
control.
Load disturbance
angle
FIGURE P4.7
Robot control
system.