
Page 64 - Modern Control Systems
P. 64
38 Chapter 1 Introduction to Control Systems
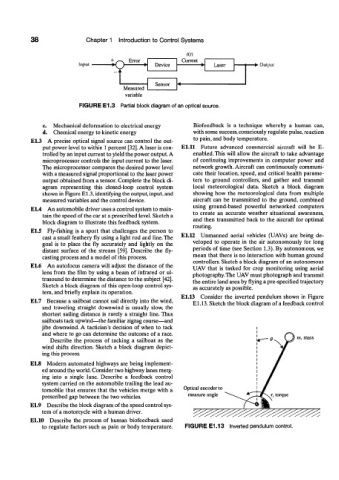
/(/)
Error Current
Inpul Device Laser - • Output
Sensor
Measured
variable
FIGURE E1.3 Partial block diagram of an optical source.
c. Mechanical deformation to electrical energy Biofeedback is a technique whereby a human can,
d. Chemical energy to kinetic energy with some success, consciously regulate pulse, reaction
to pain, and body temperature.
E1.3 A precise optical signal source can control the out-
put power level to within 1 percent [32]. A laser is con- El.ll Future advanced commercial aircraft will be E-
trolled by an input current to yield the power output. A enabled. This will allow the aircraft to take advantage
microprocessor controls the input current to the laser. of continuing improvements in computer power and
The microprocessor compares the desired power level network growth. Aircraft can continuously communi-
with a measured signal proportional to the laser power cate their location, speed, and critical health parame-
output obtained from a sensor. Complete the block di- ters to ground controllers, and gather and transmit
agram representing this closed-loop control system local meteorological data. Sketch a block diagram
shown in Figure El.3, identifying the output, input, and showing how the meteorological data from multiple
measured variables and the control device. aircraft can be transmitted to the ground, combined
using ground-based powerful networked computers
E1.4 An automobile driver uses a control system to main-
situational
accurate
weather
awareness,
an
tain the speed of the car at a prescribed level. Sketch a to create transmitted back to the aircraft for optimal
and
then
block diagram to illustrate this feedback system.
routing.
E1.5 Fly-fishing is a sport that challenges the person to
cast a small feathery fly using a light rod and line. The E1.12 Unmanned aerial vehicles (UAVs) are being de-
goal is to place the fly accurately and lightly on the veloped to operate in the air autonomously for long
distant surface of the stream [59]. Describe the fly- periods of time (see Section 1.3). By autonomous, we
casting process and a model of this process. mean that there is no interaction with human ground
controllers. Sketch a block diagram of an autonomous
E1.6 An autofocus camera will adjust the distance of the UAV that is tasked for crop monitoring using aerial
lens from the film by using a beam of infrared or ul- photography.The UAV must photograph and transmit
trasound to determine the distance to the subject [42]. the entire land area by flying a pre-specified trajectory
Sketch a block diagram of this open-loop control sys- as accurately as possible.
tem, and briefly explain its operation.
E1.13 Consider the inverted pendulum shown in Figure
E1.7 Because a sailboat cannot sail directly into the wind, El. 13. Sketch the block diagram of a feedback control
and traveling straight downwind is usually slow, the
shortest sailing distance is rarely a straight line. Thus
sailboats tack upwind—the familiar zigzag course—and
jibe downwind. A tactician's decision of when to tack
and where to go can determine the outcome of a race.
Describe the process of tacking a sailboat as the m, mass
wind shifts direction. Sketch a block diagram depict-
ing this process.
E1.8 Modern automated highways are being implement-
ed around the world. Consider two highway lanes merg-
ing into a single lane. Describe a feedback control
system carried on the automobile trailing the lead au-
tomobile that ensures that the vehicles merge with a Optical encoder to
prescribed gap between the two vehicles. measure angle ; torque
E1.9 Describe the block diagram of the speed control sys-
tem of a motorcycle with a human driver.
El.lO Describe the process of human biofeedback used
to regulate factors such as pain or body temperature. FIGURE E1.13 Inverted pendulum control.