
Page 110 - Optofluidics Fundamentals, Devices, and Applications
P. 110
Optofluidic Trapping and Transport Using Planar Photonic Devices 91
x
r
z F scat + F diss
y
Cover F grad
x = 0
Guide
x = –t
Substrate
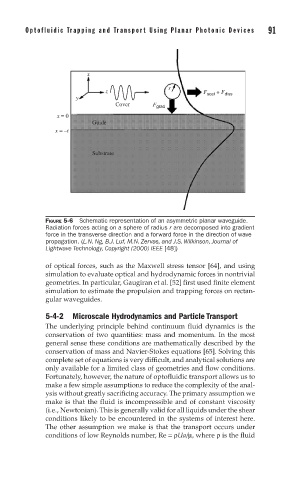
FIGURE 5-6 Schematic representation of an asymmetric planar waveguide.
Radiation forces acting on a sphere of radius r are decomposed into gradient
force in the transverse direction and a forward force in the direction of wave
propagation. (L.N. Ng, B.J. Luf, M.N. Zervas, and J.S. Wilkinson, Journal of
Lightwave Technology, Copyright (2000) IEEE [48])
of optical forces, such as the Maxwell stress tensor [64], and using
simulation to evaluate optical and hydrodynamic forces in nontrivial
geometries. In particular, Gaugiran et al. [52] first used finite element
simulation to estimate the propulsion and trapping forces on rectan-
gular waveguides.
5-4-2 Microscale Hydrodynamics and Particle Transport
The underlying principle behind continuum fluid dynamics is the
conservation of two quantities: mass and momentum. In the most
general sense these conditions are mathematically described by the
conservation of mass and Navier-Stokes equations [65]. Solving this
complete set of equations is very difficult, and analytical solutions are
only available for a limited class of geometries and flow conditions.
Fortunately, however, the nature of optofluidic transport allows us to
make a few simple assumptions to reduce the complexity of the anal-
ysis without greatly sacrificing accuracy. The primary assumption we
make is that the fluid is incompressible and of constant viscosity
(i.e., Newtonian). This is generally valid for all liquids under the shear
conditions likely to be encountered in the systems of interest here.
The other assumption we make is that the transport occurs under
conditions of low Reynolds number, Re =ρUa/μ, where ρ is the fluid