
Page 106 - PDA Robotics Using Your Personal Digital Assistant to Control Your Robot
P. 106
PDA 05 5/30/03 11:35 AM Page 82
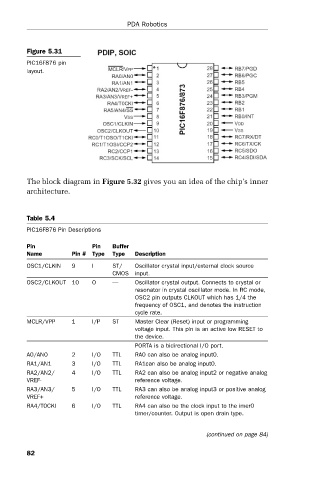
Figure 5.31
PIC16F876 pin PDA Robotics
layout.
The block diagram in Figure 5.32 gives you an idea of the chip’s inner
architecture.
Table 5.4
PIC16F876 Pin Descriptions
Pin Pin Buffer
Name Pin # Type Type Description
OSC1/CLKIN 9 I ST/ Oscillator crystal input/external clock source
CMOS input.
OSC2/CLKOUT 10 O — Oscillator crystal output. Connects to crystal or
resonator in crystal oscillator mode. In RC mode,
OSC2 pin outputs CLKOUT which has 1/4 the
frequency of OSC1, and denotes the instruction
cycle rate.
MCLR/VPP 1 I/P ST Master Clear (Reset) input or programming
voltage input. This pin is an active low RESET to
the device.
PORTA is a bidirectional I/O port.
A0/AN0 2 I/O TTL RA0 can also be analog input0.
RA1/AN1 3 I/O TTL RA1can also be analog input0.
RA2/AN2/ 4 I/O TTL RA2 can also be analog input2 or negative analog
VREF- reference voltage.
RA3/AN3/ 5 I/O TTL RA3 can also be analog input3 or positive analog
VREF+ reference voltage.
RA4/T0CKI 6 I/O TTL RA4 can also be the clock input to the imer0
timer/counter. Output is open drain type.
(continued on page 84)
82