
Page 93 - Programming the Photon Getting Started With the Internet of Things
P. 93
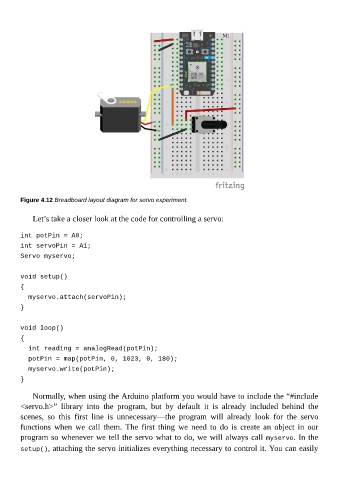
Figure 4.12 Breadboard layout diagram for servo experiment.
Let’s take a closer look at the code for controlling a servo:
int potPin = A0;
int servoPin = A1;
Servo myservo;
void setup()
{
myservo.attach(servoPin);
}
void loop()
{
int reading = analogRead(potPin);
potPin = map(potPin, 0, 1023, 0, 180);
myservo.write(potPin);
}
Normally, when using the Arduino platform you would have to include the “#include
<servo.h>” library into the program, but by default it is already included behind the
scenes, so this first line is unnecessary—the program will already look for the servo
functions when we call them. The first thing we need to do is create an object in our
program so whenever we tell the servo what to do, we will always call myservo. In the
setup(), attaching the servo initializes everything necessary to control it. You can easily