
Page 124 - Rapid Learning in Robotics
P. 124
110 Application Examples in the Robotics Domain
(a) (b)
+
X X
θ r
(c) X θ (d) X c (e) X’ r
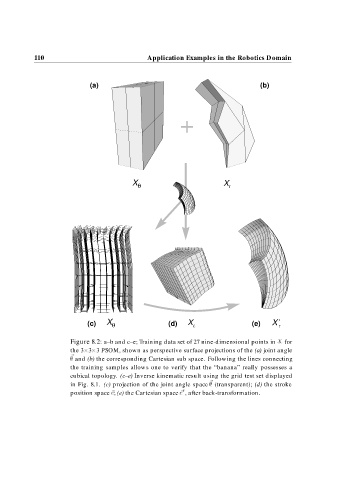
Figure 8.2: a–b and c–e; Training data set of 27 nine-dimensional points in X for
the 3 3 3 PSOM, shown as perspective surface projections of the (a) joint angle
and (b) the corresponding Cartesian sub space. Following the lines connecting
the training samples allows one to verify that the “banana” really possesses a
cubical topology. (c–e) Inverse kinematic result using the grid test set displayed
in Fig. 8.1. (c) projection of the joint angle space (transparent); (d) the stroke
position space ; (e) the Cartesian space r , after back-transformation.
c