
Page 30 - Rapid Learning in Robotics
P. 30
16 The Robotics Laboratory
2.2 Actuation: The Hand “Manus”
For the purpose of studying dextrous manipulation tasks, our robot lab is
equipped with an hydraulic robot hand with (up to) four identical 3-DOF
fingers modules, see Fig. 2.4. The hand prototype was developed and built
by the mechanical engineering group of Prof. Pfeiffer at the Technical Uni-
versity of Munich (“TUM-hand”). We received the final hand prototype
comprising four completely actuated fingers, the sensor interface, and mo-
tor driver electronics. The robot finger's design and its mobility resembles
that of the human index finger, but scaled up to about 110 %.
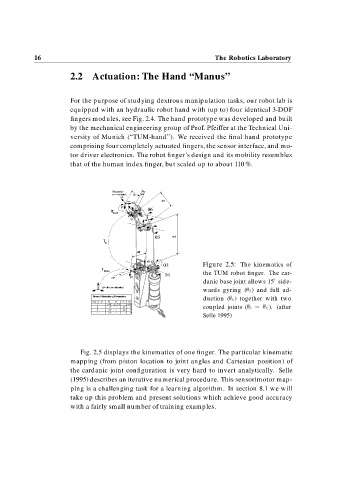
Figure 2.5: The kinematics of
the TUM robot finger. The car-
danic base joint allows 15 side-
wards gyring ( ) and full ad-
duction ( ) together with two
coupled joints ( ). (after
Selle 1995)
Fig. 2.5 displays the kinematics of one finger. The particular kinematic
mapping (from piston location to joint angles and Cartesian position) of
the cardanic joint configuration is very hard to invert analytically. Selle
(1995) describes an iterative numerical procedure. This sensorimotor map-
ping is a challenging task for a learning algorithm. In section 8.1 we will
take up this problem and present solutions which achieve good accuracy
with a fairly small number of training examples.