
Page 212 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 212
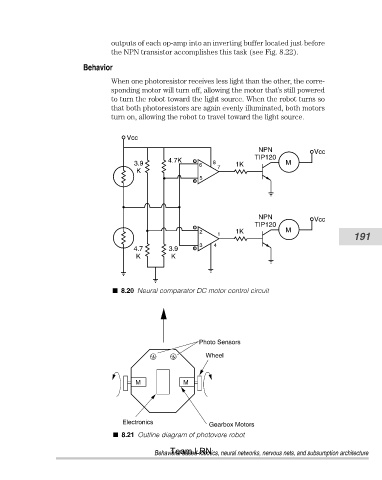
the NPN transistor accomplishes this task (see Fig. 8.22).
Behavior outputs of each op-amp into an inverting buffer located just before
When one photoresistor receives less light than the other, the corre-
sponding motor will turn off, allowing the motor that’s still powered
to turn the robot toward the light source. When the robot turns so
that both photoresistors are again evenly illuminated, both motors
turn on, allowing the robot to travel toward the light source.
Vcc
NPN Vcc
TIP120
4.7K –
3.9 6 8 7 1K M
K
5
+
NPN Vcc
TIP120
–
2 1K M
1
191
3 4
4.7 3.9 +
K K
8.20 Neural comparator DC motor control circuit
Photo Sensors
Wheel
M M
Electronics Gearbox Motors
8.21 Outline diagram of photovore robot
Team LRN
Behavioral-based robotics, neural networks, nervous nets, and subsumption architecture