
Page 215 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 215
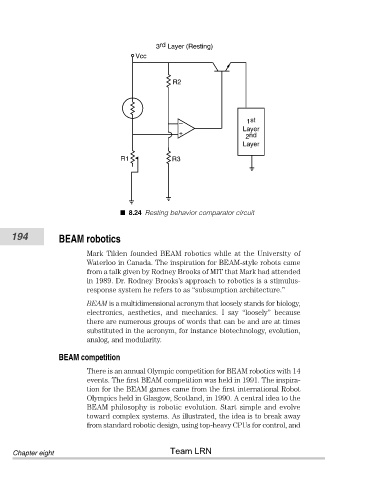
3 rd Layer (Resting)
Vcc
R2
1 st
–
Layer
+
2 nd
Layer
R1 R3
8.24 Resting behavior comparator circuit
194 BEAM robotics
Mark Tilden founded BEAM robotics while at the University of
Waterloo in Canada. The inspiration for BEAM-style robots came
from a talk given by Rodney Brooks of MIT that Mark had attended
in 1989. Dr. Rodney Brooks’s approach to robotics is a stimulus-
response system he refers to as “subsumption architecture.”
BEAM is a multidimensional acronym that loosely stands for biology,
electronics, aesthetics, and mechanics. I say “loosely” because
there are numerous groups of words that can be and are at times
substituted in the acronym, for instance biotechnology, evolution,
analog, and modularity.
BEAM competition
There is an annual Olympic competition for BEAM robotics with 14
events. The first BEAM competition was held in 1991. The inspira-
tion for the BEAM games came from the first international Robot
Olympics held in Glasgow, Scotland, in 1990. A central idea to the
BEAM philosophy is robotic evolution. Start simple and evolve
toward complex systems. As illustrated, the idea is to break away
from standard robotic design, using top-heavy CPUs for control, and
Team LRN
Chapter eight