
Page 216 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 216
embrace a bottom-up approach using a layered stimulus response
(neural network, nervous network systems). Mark Tilden calls his
stimulus-response mechanisms “nervous nets.”
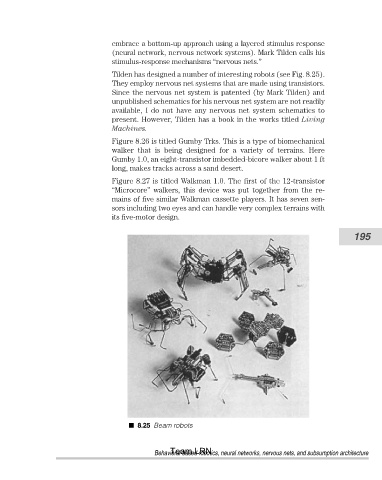
Tilden has designed a number of interesting robots (see Fig. 8.25).
They employ nervous net systems that are made using transistors.
Since the nervous net system is patented (by Mark Tilden) and
unpublished schematics for his nervous net system are not readily
available, I do not have any nervous net system schematics to
present. However, Tilden has a book in the works titled Living
Machines.
Figure 8.26 is titled Gumby Trks. This is a type of biomechanical
walker that is being designed for a variety of terrains. Here
Gumby 1.0, an eight-transistor imbedded-bicore walker about 1 ft
long, makes tracks across a sand desert.
Figure 8.27 is titled Walkman 1.0. The first of the 12-transistor
“Microcore” walkers, this device was put together from the re-
mains of five similar Walkman cassette players. It has seven sen-
sors including two eyes and can handle very complex terrains with
its five-motor design.
195
8.25 Beam robots
Team LRN
Behavioral-based robotics, neural networks, nervous nets, and subsumption architecture