
Page 214 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 214
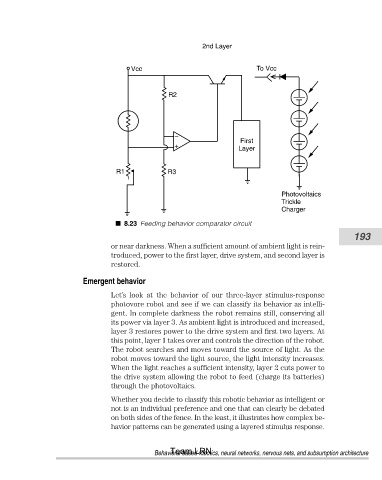
Vcc 2nd Layer To Vcc
R2
–
First
+ Layer
R1 R3
Photovoltaics
Trickle
Charger
8.23 Feeding behavior comparator circuit
193
or near darkness. When a sufficient amount of ambient light is rein-
troduced, power to the first layer, drive system, and second layer is
restored.
Emergent behavior
Let’s look at the behavior of our three-layer stimulus-response
photovore robot and see if we can classify its behavior as intelli-
gent. In complete darkness the robot remains still, conserving all
its power via layer 3. As ambient light is introduced and increased,
layer 3 restores power to the drive system and first two layers. At
this point, layer 1 takes over and controls the direction of the robot.
The robot searches and moves toward the source of light. As the
robot moves toward the light source, the light intensity increases.
When the light reaches a sufficient intensity, layer 2 cuts power to
the drive system allowing the robot to feed (charge its batteries)
through the photovoltaics.
Whether you decide to classify this robotic behavior as intelligent or
not is an individual preference and one that can clearly be debated
on both sides of the fence. In the least, it illustrates how complex be-
havior patterns can be generated using a layered stimulus response.
Team LRN
Behavioral-based robotics, neural networks, nervous nets, and subsumption architecture