
Page 213 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 213
Vcc
NPN
4.7K – TIP120 Vcc
3.9 6 8 7 1K M
K
5
+
NPN Vcc
TIP120
–
2 1K M
1
3 4
4.7 3.9 +
K K
Inverter
4049 or Equiv.
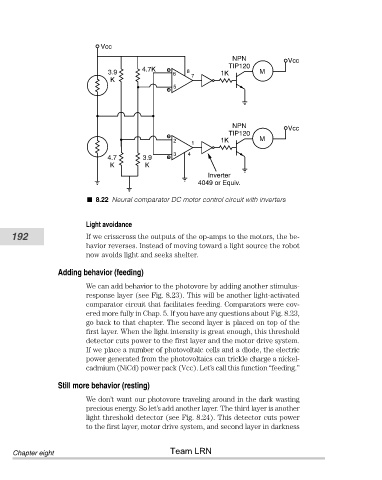
8.22 Neural comparator DC motor control circuit with inverters
Light avoidance
192 If we crisscross the outputs of the op-amps to the motors, the be-
havior reverses. Instead of moving toward a light source the robot
now avoids light and seeks shelter.
Adding behavior (feeding)
We can add behavior to the photovore by adding another stimulus-
response layer (see Fig. 8.23). This will be another light-activated
comparator circuit that facilitates feeding. Comparators were cov-
ered more fully in Chap. 5. If you have any questions about Fig. 8.23,
go back to that chapter. The second layer is placed on top of the
first layer. When the light intensity is great enough, this threshold
detector cuts power to the first layer and the motor drive system.
If we place a number of photovoltaic cells and a diode, the electric
power generated from the photovoltaics can trickle charge a nickel-
cadmium (NiCd) power pack (Vcc). Let’s call this function “feeding.”
Still more behavior (resting)
We don’t want our photovore traveling around in the dark wasting
precious energy. So let’s add another layer. The third layer is another
light threshold detector (see Fig. 8.24). This detector cuts power
to the first layer, motor drive system, and second layer in darkness
Team LRN
Chapter eight