
Page 260 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 260
Back leg
Front leg
(quantity: 2)
3
2 / "
4
3
2 / "
(70 mm)
4
(70 mm) Servo horn (quantity: 2) Linkage
Linkage 3 / " 1 / " hole
mounting holes 4 4 hole
hole
2" 2"
(51 mm) (51 mm) 90°
90°
1 / " 3 / "
3
1
3 / " 13 / " 4 4 Top view 3 / "
4 16 hole 4
(95 mm) (82 mm)
1
/ " hole
16
(for 0-80 screws)
(Holes to mount to servomotor horn)
1
1
Material: / " x / " aluminum bar stock
2
8
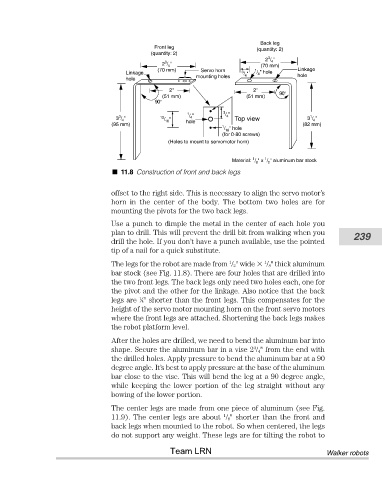
11.8 Construction of front and back legs
offset to the right side. This is necessary to align the servo motor’s
horn in the center of the body. The bottom two holes are for
mounting the pivots for the two back legs.
Use a punch to dimple the metal in the center of each hole you
plan to drill. This will prevent the drill bit from walking when you 239
drill the hole. If you don’t have a punch available, use the pointed
tip of a nail for a quick substitute.
1
1
The legs for the robot are made from / 2" wide / 8" thick aluminum
bar stock (see Fig. 11.8). There are four holes that are drilled into
the two front legs. The back legs only need two holes each, one for
the pivot and the other for the linkage. Also notice that the back
legs are ⁄4" shorter than the front legs. This compensates for the
1
height of the servo motor mounting horn on the front servo motors
where the front legs are attached. Shortening the back legs makes
the robot platform level.
After the holes are drilled, we need to bend the aluminum bar into
3
shape. Secure the aluminum bar in a vise 2 / 4" from the end with
the drilled holes. Apply pressure to bend the aluminum bar at a 90
degree angle. It’s best to apply pressure at the base of the aluminum
bar close to the vise. This will bend the leg at a 90 degree angle,
while keeping the lower portion of the leg straight without any
bowing of the lower portion.
The center legs are made from one piece of aluminum (see Fig.
1
11.9). The center legs are about / 8" shorter than the front and
back legs when mounted to the robot. So when centered, the legs
do not support any weight. These legs are for tilting the robot to
Team LRN Walker robots