
Page 262 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 262
3
5 / "
4
threaded rod
Pivot 4-40 (146 mm) R L
Binding post & screw
4-40
threaded Leg
rod
Body
Plastic
washers
Nuts
Close-Up 241
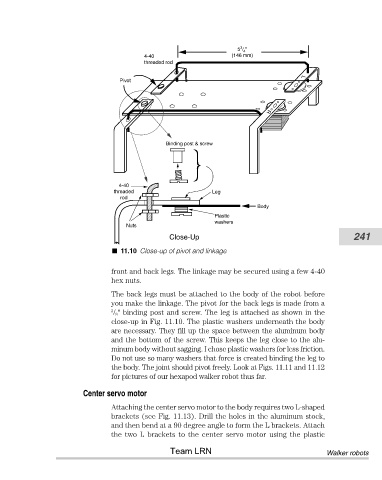
11.10 Close-up of pivot and linkage
front and back legs. The linkage may be secured using a few 4-40
hex nuts.
The back legs must be attached to the body of the robot before
you make the linkage. The pivot for the back legs is made from a
3
/ 8" binding post and screw. The leg is attached as shown in the
close-up in Fig. 11.10. The plastic washers underneath the body
are necessary. They fill up the space between the aluminum body
and the bottom of the screw. This keeps the leg close to the alu-
minum body without sagging. I chose plastic washers for less friction.
Do not use so many washers that force is created binding the leg to
the body. The joint should pivot freely. Look at Figs. 11.11 and 11.12
for pictures of our hexapod walker robot thus far.
Center servo motor
Attaching the center servo motor to the body requires two L-shaped
brackets (see Fig. 11.13). Drill the holes in the aluminum stock,
and then bend at a 90 degree angle to form the L brackets. Attach
the two L brackets to the center servo motor using the plastic
Team LRN Walker robots