
Page 396 - Schaum's Outline of Theory and Problems of Signals and Systems
P. 396
CHAP. 71 STATE SPACE ANALYSIS
7.8. Find state equations of a discrete-time system described by
Because of the existence of the term $x[n - 11 on the right-hand side of Eq. (7.82), the
selection of y[n - 21 and y[n - 11 as state variables will not yield the desired state equations of
the system. Thus, in order to find suitable state variables we construct a simulation diagram of
Eq. (7.82) using unit-delay elements, amplifiers, and adders. Taking the z-transforms of both
sides of Eq. (7.82) and rearranging, we obtain
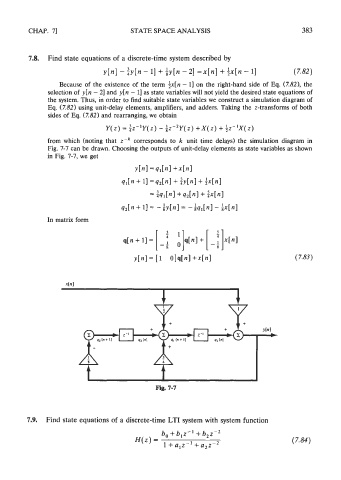
from which (noting that z-& corresponds to k unit time delays) the simulation diagram in
Fig. 7-7 can be drawn. Choosing the outputs of unit-delay elements as state variables as shown
in Fig. 7-7, we get
Y [ ~ I =s,[nl +x[nl
4Jn + 11 =q,[nI + :y[n] + $+I
= fs,[nl+42[nl+ $[nI
q2[n + 11 = - iy[n] = - iql[n] - ix[n]
In matrix form
Fig. 7-7
7.9. Find state equations of a discrete-time LTI system with system function