
Page 401 - Schaum's Outline of Theory and Problems of Signals and Systems
P. 401
388 STATE SPACE ANALYSIS [CHAP. 7
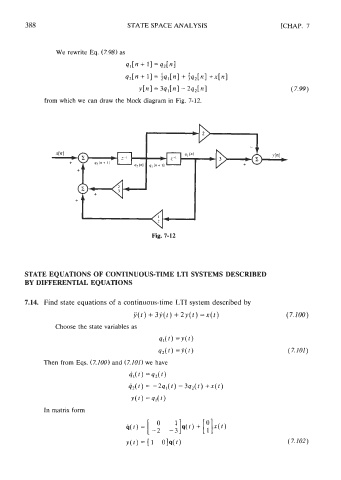
We rewrite Eq. (7.98) as
4dn + 11 = qzbl
q2[n + 11 = &l[n] + :q,[n] +x[n]
Y ~ I3q,[nl - 2q2bI
=
from which we can draw the block diagram in Fig. 7-12.
Fig. 7-12
STATE EQUATIONS OF CONTINUOUS-TIME LTI SYSTEMS DESCRIBED
BY DIFFERENTIAL EQUATIONS
7.14. Find state equations of a continuous-time LTI system described by
y(t) + 3j(t) + 2y(t) =x(t) (7.100)
Choose the state variables as
sdt) =y(t)
92(1) =~(t)
Then from Eqs. (7.100) and (7,101) we have
41(~) =q2(l)
42(t) = -2ql(f) -392(1) +x(t)
Y(t) =4dt)
In matrix form