
Page 57 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 57
32 A QUICK SKETCH OF MAJOR ISSUES IN ROBOTICS
b (x, y)
y a 2 y q 2 a
a 1
q 1
x b x
(a) (b)
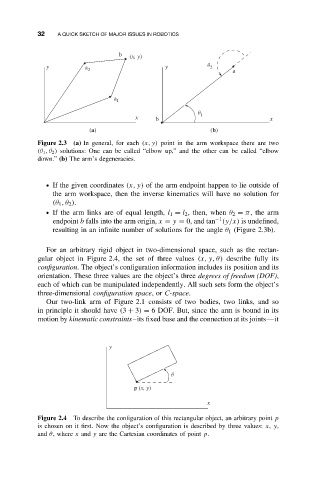
Figure 2.3 (a) In general, for each (x, y) point in the arm workspace there are two
(θ 1 ,θ 2 ) solutions: One can be called “elbow up,” and the other can be called “elbow
down.” (b) The arm’s degeneracies.
• If the given coordinates (x, y) of the arm endpoint happen to lie outside of
the arm workspace, then the inverse kinematics will have no solution for
(θ 1 ,θ 2 ).
• If the arm links are of equal length, l 1 = l 2 , then, when θ 2 = π,the arm
−1
endpoint b falls into the arm origin, x = y = 0, and tan (y/x) is undefined,
resulting in an infinite number of solutions for the angle θ 1 (Figure 2.3b).
For an arbitrary rigid object in two-dimensional space, such as the rectan-
gular object in Figure 2.4, the set of three values (x, y, θ) describe fully its
configuration. The object’s configuration information includes its position and its
orientation. These three values are the object’s three degrees of freedom (DOF),
each of which can be manipulated independently. All such sets form the object’s
three-dimensional configuration space,or C-space.
Our two-link arm of Figure 2.1 consists of two bodies, two links, and so
in principle it should have (3 + 3) = 6 DOF. But, since the arm is bound in its
motion by kinematic constraints–its fixed base and the connection at its joints—it
y
q
p (x, y)
x
Figure 2.4 To describe the configuration of this rectangular object, an arbitrary point p
is chosen on it first. Now the object’s configuration is described by three values: x, y,
and θ,where x and y are the Cartesian coordinates of point p.