
Page 155 - The Combined Finite-Discrete Element Method
P. 155
138 DEFORMABILITY OF DISCRETE ELEMENTS
(where s is a scalar) yields three real eigenvalues (principal values) corresponding to three
mutually orthogonal directions (principal directions), such that
Ue 1 = s 1 e 1
(4.29)
Ue 2 = s 2 e 2
Ue 3 = s 3 e 3
The matrix of components of tensor U relative to the basis
(e 1 , e 2 , e 3 ) (4.30)
is therefore diagonal:
s 1 0 0
U = 0 s 2 0 (4.31)
0 0 s 3
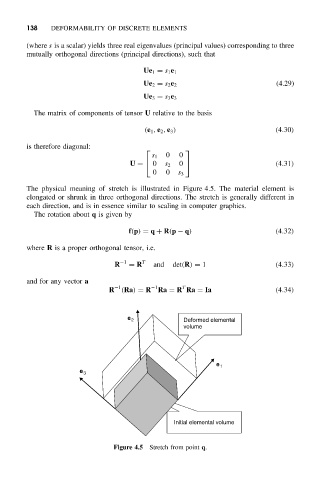
The physical meaning of stretch is illustrated in Figure 4.5. The material element is
elongated or shrunk in three orthogonal directions. The stretch is generally different in
each direction, and is in essence similar to scaling in computer graphics.
The rotation about q is given by
f(p) = q + R(p − q) (4.32)
where R is a proper orthogonal tensor, i.e.
R −1 = R T and det(R) = 1 (4.33)
and for any vector a
−1
T
−1
R (Ra) = R Ra = R Ra = Ia (4.34)
e 2 Deformed elemental
volume
e 1
e 3
Initial elemental volume
Figure 4.5 Stretch from point q.