
Page 1144 - The Mechatronics Handbook
P. 1144
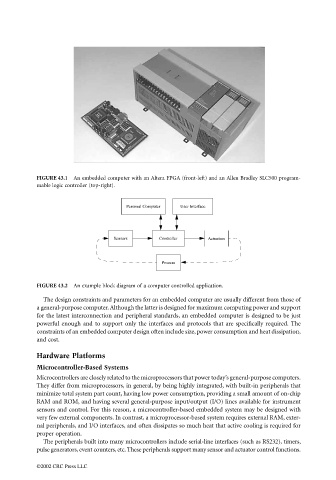
FIGURE 43.1 An embedded computer with an Altera FPGA (front-left) and an Allen Bradley SLC500 program-
mable logic controller (top-right).
Personal Computer User Interface
Sensors Controller Actuators
Process
FIGURE 43.2 An example block diagram of a computer controlled application.
The design constraints and parameters for an embedded computer are usually different from those of
a general-purpose computer. Although the latter is designed for maximum computing power and support
for the latest interconnection and peripheral standards, an embedded computer is designed to be just
powerful enough and to support only the interfaces and protocols that are specifically required. The
constraints of an embedded computer design often include size, power consumption and heat dissipation,
and cost.
Hardware Platforms
Microcontroller-Based Systems
Microcontrollers are closely related to the microprocessors that power today’s general-purpose computers.
They differ from microprocessors, in general, by being highly integrated, with built-in peripherals that
minimize total system part count, having low power consumption, providing a small amount of on-chip
RAM and ROM, and having several general-purpose input/output (I/O) lines available for instrument
sensors and control. For this reason, a microcontroller-based embedded system may be designed with
very few external components. In contrast, a microprocessor-based system requires external RAM, exter-
nal peripherals, and I/O interfaces, and often dissipates so much heat that active cooling is required for
proper operation.
The peripherals built into many microcontrollers include serial-line interfaces (such as RS232), timers,
pulse generators, event counters, etc. These peripherals support many sensor and actuator control functions.
©2002 CRC Press LLC