
Page 1182 - The Mechatronics Handbook
P. 1182
TARGET/DETECTOR
HEAT SOURCE
LENS
TARGET ENCLOSURE
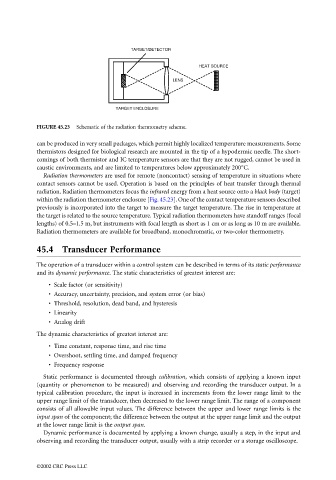
FIGURE 45.23 Schematic of the radiation thermometry scheme.
can be produced in very small packages, which permit highly localized temperature measurements. Some
thermistors designed for biological research are mounted in the tip of a hypodermic needle. The short-
comings of both thermistor and IC temperature sensors are that they are not rugged, cannot be used in
caustic environments, and are limited to temperatures below approximately 200°C.
Radiation thermometers are used for remote (noncontact) sensing of temperature in situations where
contact sensors cannot be used. Operation is based on the principles of heat transfer through thermal
radiation. Radiation thermometers focus the infrared energy from a heat source onto a black body (target)
within the radiation thermometer enclosure [Fig. 45.23]. One of the contact temperature sensors described
previously is incorporated into the target to measure the target temperature. The rise in temperature at
the target is related to the source temperature. Typical radiation thermometers have standoff ranges (focal
lengths) of 0.5–1.5 m, but instruments with focal length as short as 1 cm or as long as 10 m are available.
Radiation thermometers are available for broadband, monochromatic, or two-color thermometry.
45.4 Transducer Performance
The operation of a transducer within a control system can be described in terms of its static performance
and its dynamic performance. The static characteristics of greatest interest are:
• Scale factor (or sensitivity)
• Accuracy, uncertainty, precision, and system error (or bias)
• Threshold, resolution, dead band, and hysteresis
• Linearity
• Analog drift
The dynamic characteristics of greatest interest are:
• Time constant, response time, and rise time
• Overshoot, settling time, and damped frequency
• Frequency response
Static performance is documented through calibration, which consists of applying a known input
(quantity or phenomenon to be measured) and observing and recording the transducer output. In a
typical calibration procedure, the input is increased in increments from the lower range limit to the
upper range limit of the transducer, then decreased to the lower range limit. The range of a component
consists of all allowable input values. The difference between the upper and lower range limits is the
input span of the component; the difference between the output at the upper range limit and the output
at the lower range limit is the output span.
Dynamic performance is documented by applying a known change, usually a step, in the input and
observing and recording the transducer output, usually with a strip recorder or a storage oscilloscope.
©2002 CRC Press LLC