
Page 994 - The Mechatronics Handbook
P. 994
0066_frame_Ch33.fm Page 18 Wednesday, January 9, 2002 8:00 PM
Fuzzification Product-norm Normalization Defuzzification
A 11
11
z 1 z 1
A 12
x 1
12
w 1
z 2 z 2
21
A 1n w 2
y
22 S
A 21
w n
x 2
A 22 1n
z n z n
2n
A 2n
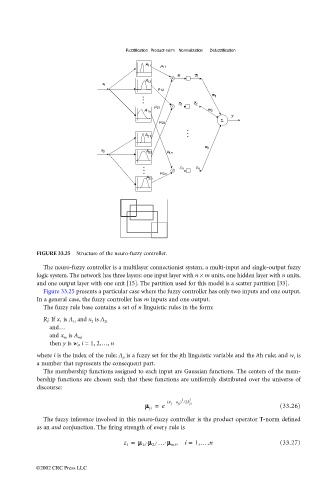
FIGURE 33.25 Structure of the neuro-fuzzy controller.
The neuro-fuzzy controller is a multilayer connectionist system, a multi-input and single-output fuzzy
logic system. The network has three layers: one input layer with n × m units, one hidden layer with n units,
and one output layer with one unit [15]. The partition used for this model is a scatter partition [33].
Figure 33.25 presents a particular case where the fuzzy controller has only two inputs and one output.
In a general case, the fuzzy controller has m inputs and one output.
The fuzzy rule base contains a set of n linguistic rules in the form:
R i : If x 1 is A 1i and x 2 is A 2i
and…
and x m is A mi
then y is w i , i = 1, 2,…, n
where i is the index of the rule; A ji is a fuzzy set for the jth linguistic variable and the ith rule; and w i is
a number that represents the consequent part.
The membership functions assigned to each input are Gaussian functions. The centers of the mem-
bership functions are chosen such that these functions are uniformly distributed over the universe of
discourse:
2 2
( – x – a ) /2b ji
ji
j
µµ µ µ = e (33.26)
ji
The fuzzy inference involved in this neuro-fuzzy controller is the product operator T-norm defined
as an and conjunction. The firing strength of every rule is
z i = µµ µ µ . µµ . . mi i = 1,…,n (33.27)
1i µµ 2i … µµ µµ ,
©2002 CRC Press LLC