
Page 993 - The Mechatronics Handbook
P. 993
Mux contr In1 Out1 K−
controller
Scope
Memory
Plant
inv Mux
+
− 1 inverse model
Scope1
t3
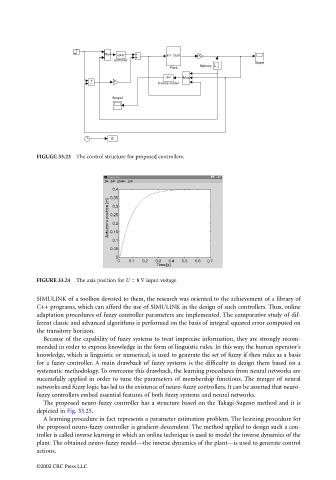
FIGUGE 33.23 The control structure for proposed controllers.
FIGURE 33.24 The axis position for U = 8 V input voltage.
SIMULINK of a toolbox devoted to them, the research was oriented to the achievement of a library of
C++ programs, which can afford the use of SIMULINK in the design of such controllers. Thus, online
adaptation procedures of fuzzy controller parameters are implemented. The comparative study of dif-
ferent classic and advanced algorithms is performed on the basis of integral squared error computed on
the transitory horizon.
Because of the capability of fuzzy systems to treat imprecise information, they are strongly recom-
mended in order to express knowledge in the form of linguistic rules. In this way, the human operator’s
knowledge, which is linguistic or numerical, is used to generate the set of fuzzy if-then rules as a basis
for a fuzzy controller. A main drawback of fuzzy systems is the difficulty to design them based on a
systematic methodology. To overcome this drawback, the learning procedures from neural networks are
successfully applied in order to tune the parameters of membership functions. The merger of neural
networks and fuzzy logic has led to the existence of neuro-fuzzy controllers. It can be asserted that neuro-
fuzzy controllers embed essential features of both fuzzy systems and neural networks.
The proposed neuro-fuzzy controller has a structure based on the Takagi-Sugeno method and it is
depicted in Fig. 33.25.
the proposed neuro-fuzzy controller is gradient-descendent. The method applied to design such a con-
A learning procedure in fact represents a parameter estimation problem. The learning procedure for
troller is called inverse learning in which an online technique is used to model the inverse dynamics of the
plant. The obtained neuro-fuzzy model—the inverse dynamics of the plant—is used to generate control
actions.
©2002 CRC Press LLC