
Page 992 - The Mechatronics Handbook
P. 992
Human u Y
operator System
Sensor
Inputs
u +
X m
Σ
−
e
BP
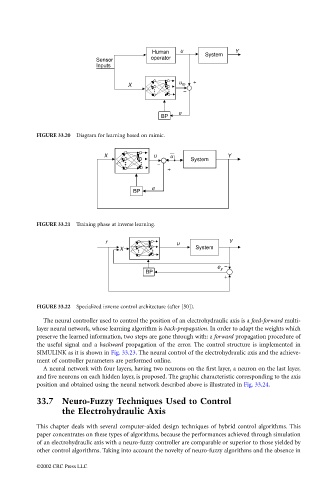
FIGURE 33.20 Diagram for learning based on mimic.
X u u Y
Σ System
−
+
e
BP
FIGURE 33.21 Training phase at inverse learning.
r u Y
X System
e y −
BP Σ
+
FIGURE 33.22 Specialized inverse control architecture (after [50]).
The neural controller used to control the position of an electrohydraulic axis is a feed-forward multi-
layer neural network, whose learning algorithm is back-propagation. In order to adapt the weights which
preserve the learned information, two steps are gone through with: a forward propagation procedure of
the useful signal and a backward propagation of the error. The control structure is implemented in
SIMULINK as it is shown in Fig. 33.23. The neural control of the electrohydraulic axis and the achieve-
ment of controller parameters are performed online.
A neural network with four layers, having two neurons on the first layer, a neuron on the last layer,
and five neurons on each hidden layer, is proposed. The graphic characteristic corresponding to the axis
position and obtained using the neural network described above is illustrated in Fig. 33.24.
33.7 Neuro-Fuzzy Techniques Used to Control
the Electrohydraulic Axis
This chapter deals with several computer-aided design techniques of hybrid control algorithms. This
paper concentrates on these types of algorithms, because the performances achieved through simulation
of an electrohydraulic axis with a neuro-fuzzy controller are comparable or superior to those yielded by
other control algorithms. Taking into account the novelty of neuro-fuzzy algorithms and the absence in
©2002 CRC Press LLC