
Page 162 - Welding Robots Technology, System Issues, and Applications
P. 162
150 Welding Robots
welding models it is possible to perform several adaptations in real time that go
beyond the simple joint finding and tracking tasks (here considered as background
tasks): weaving width, welding speed, wire feed speed, arc voltage, arc current,
etc., are some examples of welding parameters that should be adapted if a better
quality weld is required (see Chapter 4).
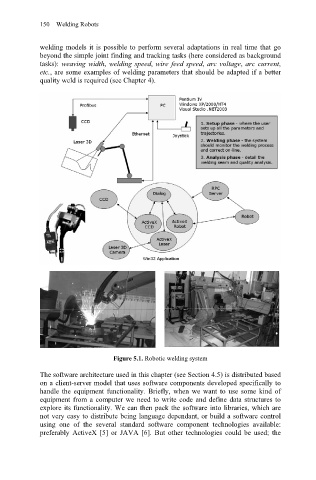
Figure 5.1. Robotic welding system
The software architecture used in this chapter (see Section 4.5) is distributed based
on a client-server model that uses software components developed specifically to
handle the equipment functionality. Briefly, when we want to use some kind of
equipment from a computer we need to write code and define data structures to
explore its functionality. We can then pack the software into libraries, which are
not very easy to distribute being language dependant, or build a software control
using one of the several standard software component technologies available:
preferably ActiveX [5] or JAVA [6]. But other technologies could be used; the