
Page 167 - Welding Robots Technology, System Issues, and Applications
P. 167
Robotic Welding: Application Examples 155
Simple_Test_Example
4
Number of points in this file
Name of the point
1 - Origem Name of the file
1 Type of point (welding – 0, approach/escape - 1)
656.419922 x (Cartesian position)
-444.451813 y
730.853149 z
0.091980 q1 (quaternion)
0.001690 q2
0.995760 q3
0.002070 q4
cf1 (configuration matrix)
0
Definition of point 1 0 cf6
-1
cf4
0
cfx
ex1 (external axis)
8999999488
ex2
8999999488
8999999488
ex4
8999999488 ex3
8999999488 ex5
8999999488 ex6
0.00 Current [A]
0.00 Voltage [V]
100 Velocity [mm/s]
5 Precision (mm)
0 Motion type (linear – 0, circular – 1, joints - 2)
...
4 - End
1
684.311096
-443.820709
581.514465
0.092050
0.001700
0.995750
0.002130
Definition of point 4 -1
0
0
0
8999999488
8999999488
8999999488
8999999488
8999999488
8999999488
0.00
0.00
10
5
0
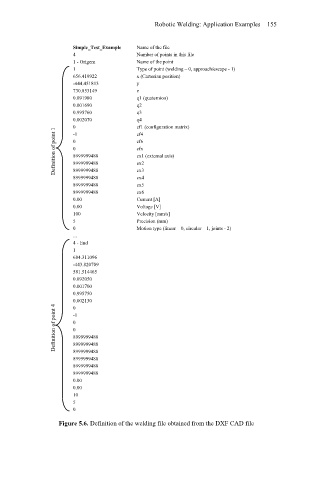
Figure 5.6. Definition of the welding file obtained from the DXF CAD file