
Page 24 - Acquisition and Processing of Marine Seismic Data
P. 24
1.2 MARINE ACOUSTIC METHODS 15
man-made targets (like gas seeps or pipelines) that the signal is less affected by the heterogene-
on the seabed. ities within the water column. The altitude of the
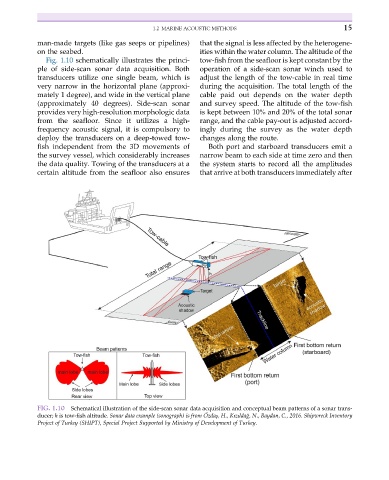
Fig. 1.10 schematically illustrates the princi- tow-fish from the seafloor is kept constant by the
ple of side-scan sonar data acquisition. Both operation of a side-scan sonar winch used to
transducers utilize one single beam, which is adjust the length of the tow-cable in real time
very narrow in the horizontal plane (approxi- during the acquisition. The total length of the
mately 1 degree), and wide in the vertical plane cable paid out depends on the water depth
(approximately 40 degrees). Side-scan sonar and survey speed. The altitude of the tow-fish
provides very high-resolution morphologic data is kept between 10% and 20% of the total sonar
from the seafloor. Since it utilizes a high- range, and the cable pay-out is adjusted accord-
frequency acoustic signal, it is compulsory to ingly during the survey as the water depth
deploy the transducers on a deep-towed tow- changes along the route.
fish independent from the 3D movements of Both port and starboard transducers emit a
the survey vessel, which considerably increases narrow beam to each side at time zero and then
the data quality. Towing of the transducers at a the system starts to record all the amplitudes
certain altitude from the seafloor also ensures that arrive at both transducers immediately after
FIG. 1.10 Schematical illustration of the side-scan sonar data acquisition and conceptual beam patterns of a sonar trans-
€
˘
ducer; h is tow-fish altitude. Sonar data example (sonograph) is from Ozdaş, H., Kızıldag, N., Baydan, C., 2016. Shipwreck Inventory
Project of Turkey (SHIPT), Special Project Supported by Ministry of Development of Turkey.