
Page 241 - Amphibionics : Build Your Own Biologically Inspired Robot
P. 241
Amphibionics 06 3/24/03 9:02 AM Page 220
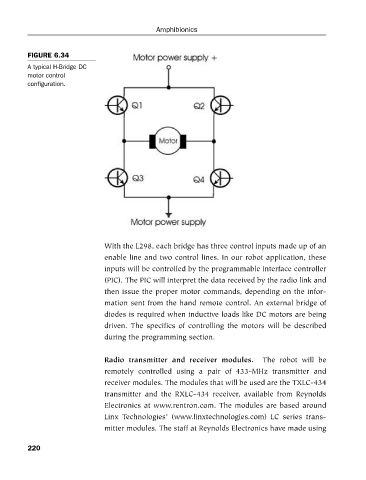
FIGURE 6.34
A typical H-Bridge DC
motor control Amphibionics
configuration.
With the L298, each bridge has three control inputs made up of an
enable line and two control lines. In our robot application, these
inputs will be controlled by the programmable interface controller
(PIC). The PIC will interpret the data received by the radio link and
then issue the proper motor commands, depending on the infor-
mation sent from the hand remote control. An external bridge of
diodes is required when inductive loads like DC motors are being
driven. The specifics of controlling the motors will be described
during the programming section.
Radio transmitter and receiver modules. The robot will be
remotely controlled using a pair of 433-MHz transmitter and
receiver modules. The modules that will be used are the TXLC-434
transmitter and the RXLC-434 receiver, available from Reynolds
Electronics at www.rentron.com. The modules are based around
Linx Technologies’ (www.linxtechnologies.com) LC series trans-
mitter modules. The staff at Reynolds Electronics have made using
220