
Page 589 - Automotive Engineering Powertrain Chassis System and Vehicle Body
P. 589
CHAP TER 1 8. 1 Design and material utilization
Stress
12 element 24 element
mesh mesh
Mesh 1 – 48 Elements
Mesh 2 – 100 Elements
Mesh 3 – 192 Elements
Hook Mesh 4 – 24 Elements
pressure 48 Element Mesh 5 – 12 Elements
mesh
loading
(a) MES 3 and 4
almost coincident
100 Element 192 Element Node position
mesh mesh
(c)
(b)
y
0 σ x
s ix b i c i
c j s my c i
s jx b j 0 c j σ y
s mx b m 0 c m τ xy s mx
1 m
=–
2
s iy 0 c i b i σ y
b j s jy
b i
0 c j b j σ x
s jy
τ xy
0 c m b m j
s my
s jx
i
s ix b m
σ
T
(d) S = C = B σ
c m
s iy
x
3 1 2 1
Axial Planar
3 2 4 2
(e) Repetitive
Cyclic (g)
σ σ
Shape Type Geometry
Point Mass
Line Spring, beam, spar, gap Bilinear Multilinear
ε ε
Area 2D solid, axisymmetric
solid, plate (h)
Curved area Shell
Volume 3D solid
(f)
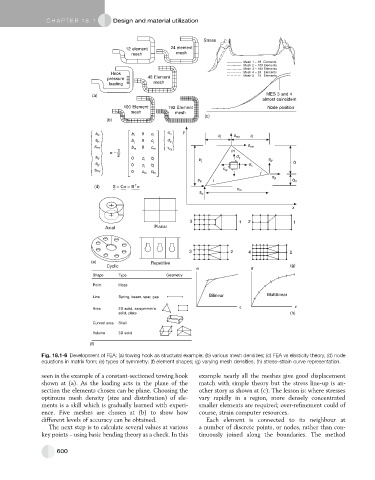
Fig. 18.1-6 Development of FEA: (a) towing hook as structural example; (b) various mesh densities; (c) FEA vs elasticity theory; (d) node
equations in matrix form; (e) types of symmetry; (f) element shapes; (g) varying mesh densities; (h) stress–strain curve representation.
seen in the example of a constant-sectioned towing hook example nearly all the meshes give good displacement
shown at (a). As the loading acts in the plane of the match with simple theory but the stress line-up is an-
section the elements chosen can be plane. Choosing the other story as shown at (c). The lesson is: where stresses
optimum mesh density (size and distribution) of ele- vary rapidly in a region, more densely concentrated
ments is a skill which is gradually learned with experi- smaller elements are required; over-refinement could of
ence. Five meshes are chosen at (b) to show how course, strain computer resources.
different levels of accuracy can be obtained. Each element is connected to its neighbour at
The next step is to calculate several values at various a number of discrete points, or nodes, rather than con-
key points – using basic bending theory as a check. In this tinuously joined along the boundaries. The method
600