
Page 328 - Autonomous Mobile Robots
P. 328
316 Autonomous Mobile Robots
20
p= 0.5
18
p=1
16
p=2
14 p=3
Tracking error (cm) 10
12
8
6
4
2
0
0 5 10 15 20 25 30 35 40 45 50
Time (sec)
FIGURE 8.4 Tracking errors ˜z for different values of p.
0.8
0.6
0.4
Acceleration (m/sec 2 ) 0.2 Leading
0
– 0.2
– 0.4 p= 0.5
p=1
p=2
– 0.6
p=3
– 0.8
0 5 10 15 20 25
Time (sec)
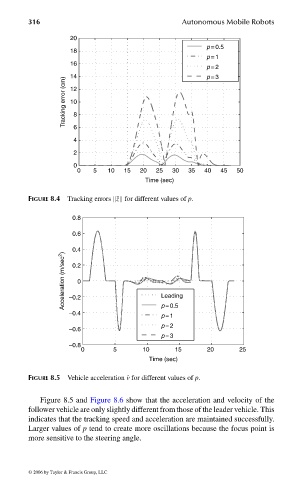
FIGURE 8.5 Vehicle acceleration ˙v for different values of p.
Figure 8.5 and Figure 8.6 show that the acceleration and velocity of the
follower vehicle are only slightly different from those of the leader vehicle. This
indicates that the tracking speed and acceleration are maintained successfully.
Larger values of p tend to create more oscillations because the focus point is
more sensitive to the steering angle.
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c008” — 2006/3/31 — 16:43 — page 316 — #22