
Page 337 - Autonomous Mobile Robots
P. 337
Unified Control Design for Autonomous Vehicle 325
20
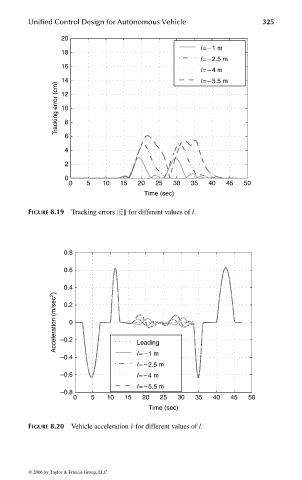
l=– 1 m
18
l=– 2.5 m
16
l=– 4 m
14 l=– 5.5 m
Tracking error (cm) 12 8
10
6
4
2
0
0 5 10 15 20 25 30 35 40 45 50
Time (sec)
FIGURE 8.19 Tracking errors ˜z for different values of l.
0.8
0.6
0.4
Acceleration (m/sec 2 ) – 0.2
0.2
0
l=– 1 m
– 0.4 Leading
l=– 2.5 m
– 0.6 l=– 4 m
l=– 5.5 m
– 0.8
0 5 10 15 20 25 30 35 40 45 50
Time (sec)
FIGURE 8.20 Vehicle acceleration ˙v for different values of l.
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c008” — 2006/3/31 — 16:43 — page 325 — #31