
Page 201 - Biomedical Engineering and Design Handbook Volume 1, Fundamentals
P. 201
178 BIOMECHANICS OF THE HUMAN BODY
7.6.2 Indeterminate Problem in Biomechanics
Both agonist and antagonist muscles contribute (unequally) to the net torque developed about a joint.
In fact, for any given joint in the body, there are many more muscles crossing the joint than there are
dof prescribing joint movement. The knee, for example, has at most 6 dof, yet there are at least
14 muscles which actuate this joint. One consequence of this arrangement is that the force developed
by each muscle cannot be determined uniquely. Specifically, there are more unknown musculo-
tendinous actuator forces than net actuator torques exerted about the knee; that is, m > n in Eq. (7.9),
which means that the matrix of muscle moment arms is not square and therefore not invertible. This
is the so-called indeterminate problem in biomechanics, and virtually all attempts to solve it are
based on the application of optimization theory (see also Chap. 6 in this volume).
7.6.3 Inverse-Dynamics Method
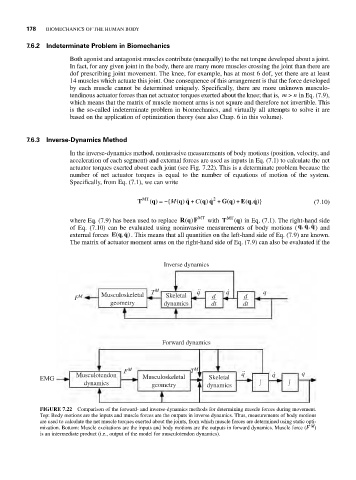
In the inverse-dynamics method, noninvasive measurements of body motions (position, velocity, and
acceleration of each segment) and external forces are used as inputs in Eq. (7.1) to calculate the net
actuator torques exerted about each joint (see Fig. 7.22). This is a determinate problem because the
number of net actuator torques is equal to the number of equations of motion of the system.
Specifically, from Eq. (7.1), we can write
(,
qq +
qq + C
T MT q () =− { () () 2 G q() + E q q)} (7.10)
M
where Eq. (7.9) has been used to replace Rq F() MT with T MT q () in Eq. (7.1). The right-hand side
of Eq. (7.10) can be evaluated using noninvasive measurements of body motions ( qqq,, ) and
external forces Eq q(, ) . This means that all quantities on the left-hand side of Eq. (7.9) are known.
The matrix of actuator moment arms on the right-hand side of Eq. (7.9) can also be evaluated if the
Inverse dynamics
.. q . q
M
T
q
F M Musculoskeletal Skeletal d d
geometry dynamics dt dt
Forward dynamics
F M T M .. .
Musculotendon q q q
EMG Musculoskeletal Skeletal
dynamics geometry dynamics ∫ ∫
FIGURE 7.22 Comparison of the forward- and inverse-dynamics methods for determining muscle forces during movement.
Top: Body motions are the inputs and muscle forces are the outputs in inverse dynamics. Thus, measurements of body motions
are used to calculate the net muscle torques exerted about the joints, from which muscle forces are determined using static opti-
mization. Bottom: Muscle excitations are the inputs and body motions are the outputs in forward dynamics. Muscle force (F M )
is an intermediate product (i.e., output of the model for musculotendon dynamics).