
Page 204 - Biomedical Engineering and Design Handbook Volume 1, Fundamentals
P. 204
BIOMECHANICS OF THE MUSCULOSKELETAL SYSTEM 181
has been used to find the optimal controls for vertical jumping (Anderson and Pandy, 1993), rising
from a chair (Pandy et al., 1995), pedaling (Fregly and Zajac, 1996), and walking (Anderson and
Pandy, in press).
If accurate measurements of body motions and external forces are available, then inverse
dynamics should be used to used to determine musculotendinous forces during movement, because
this method is much less expensive computationally. If, instead, the goal is to study how changes
in body structure affect function and performance of a motor task, then the forward-dynamics
method is preferred, for measurements of body motions and external forces are a priori not available
in this instance.
7.7 MUSCLE, LIGAMENT, AND JOINT-CONTACT FORCES
Because muscle, ligament, and joint-contact forces cannot be measured noninvasively in vivo, esti-
mates of these quantities have been obtained by combining mathematical models with either the
inverse-dynamics or the forward-dynamics approach (Sec. 7.6). Below we review the levels of mus-
culoskeletal loading incurred in the lower-limb during rehabilitation exercises, such as isokinetic
knee extension, as well as during daily activity such as gait.
7.7.1 Knee Extension Exercise
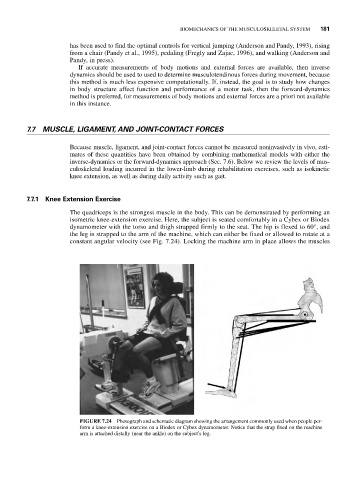
The quadriceps is the strongest muscle in the body. This can be demonstrated by performing an
isometric knee-extension exercise. Here, the subject is seated comfortably in a Cybex or Biodex
dynamometer with the torso and thigh strapped firmly to the seat. The hip is flexed to 60°, and
the leg is strapped to the arm of the machine, which can either be fixed or allowed to rotate at a
constant angular velocity (see Fig. 7.24). Locking the machine arm in place allows the muscles
FIGURE 7.24 Photograph and schematic diagram showing the arrangement commonly used when people per-
form a knee-extension exercise on a Biodex or Cybex dynamometer. Notice that the strap fixed on the machine
arm is attached distally (near the ankle) on the subject’s leg.