
Page 296 - Biomedical Engineering and Design Handbook Volume 1, Fundamentals
P. 296
VIBRATION, MECHANICAL SHOCK, AND IMPACT 273
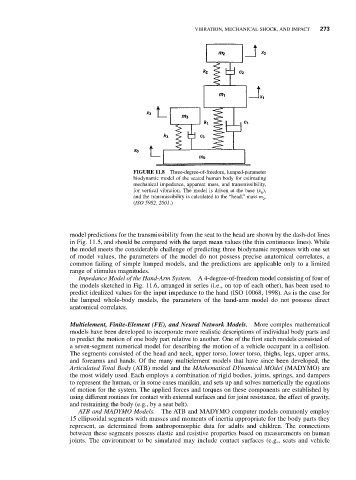
FIGURE 11.8 Three-degree-of-freedom, lumped-parameter
biodynamic model of the seated human body for estimating
mechanical impedance, apparent mass, and transmissibility,
for vertical vibration. The model is driven at the base (x ),
0
and the transmissibility is calculated to the “head,” mass m . 2
(ISO 5982, 2001.)
model predictions for the transmissibility from the seat to the head are shown by the dash-dot lines
in Fig. 11.5, and should be compared with the target mean values (the thin continuous lines). While
the model meets the considerable challenge of predicting three biodynamic responses with one set
of model values, the parameters of the model do not possess precise anatomical correlates, a
common failing of simple lumped models, and the predictions are applicable only to a limited
range of stimulus magnitudes.
Impedance Model of the Hand-Arm System. A 4-degree-of-freedom model consisting of four of
the models sketched in Fig. 11.6, arranged in series (i.e., on top of each other), has been used to
predict idealized values for the input impedance to the hand (ISO 10068, 1998). As is the case for
the lumped whole-body models, the parameters of the hand-arm model do not possess direct
anatomical correlates.
Multielement, Finite-Element (FE), and Neural Network Models. More complex mathematical
models have been developed to incorporate more realistic descriptions of individual body parts and
to predict the motion of one body part relative to another. One of the first such models consisted of
a seven-segment numerical model for describing the motion of a vehicle occupant in a collision.
The segments consisted of the head and neck, upper torso, lower torso, thighs, legs, upper arms,
and forearms and hands. Of the many multielement models that have since been developed, the
Articulated Total Body (ATB) model and the MAthematical DYnamical MOdel (MADYMO) are
the most widely used. Each employs a combination of rigid bodies, joints, springs, and dampers
to represent the human, or in some cases manikin, and sets up and solves numerically the equations
of motion for the system. The applied forces and torques on these components are established by
using different routines for contact with external surfaces and for joint resistance, the effect of gravity,
and restraining the body (e.g., by a seat belt).
ATB and MADYMO Models. The ATB and MADYMO computer models commonly employ
15 ellipsoidal segments with masses and moments of inertia appropriate for the body parts they
represent, as determined from anthropomorphic data for adults and children. The connections
between these segments possess elastic and resistive properties based on measurements on human
joints. The environment to be simulated may include contact surfaces (e.g., seats and vehicle