
Page 352 - Cam Design Handbook
P. 352
THB11 9/19/03 7:33 PM Page 340
340 CAM DESIGN HANDBOOK
So
1 Ê 1 1 ˆ
= Á + ˜. (11.54)
K Ë K K ¯
eq 1 2
In contrast to springs in parallel, if two springs connected in series have very dissimilar
stiffnesses, the equivalent stiffness will be dominated by (yet even lower than) the
spring with the lower stiffness. The same rules for series and parallel connections hold for
torsional springs.
11.4.4 Equivalent Springs and Mechanical Advantage
A spring combined with some mechanical advantage has an equivalent spring constant
that is directly analogous to the equivalent mass or inertia discussed previously.
Instead of equating the kinetic energy to determine the equivalent mass, however,
the potential energies of the two systems are equated to give an equivalent stiffness or
spring rate.
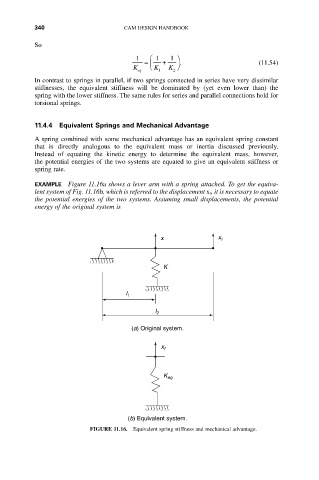
EXAMPLE Figure 11.16a shows a lever arm with a spring attached. To get the equiva-
lent system of Fig. 11.16b, which is referred to the displacement x f, it is necessary to equate
the potential energies of the two systems. Assuming small displacements, the potential
energy of the original system is
x x f
K
l 1
l 2
(a) Original system.
x f
K eq
(b) Equivalent system.
FIGURE 11.16. Equivalent spring stiffness and mechanical advantage.