
Page 242 - Control Theory in Biomedical Engineering
P. 242
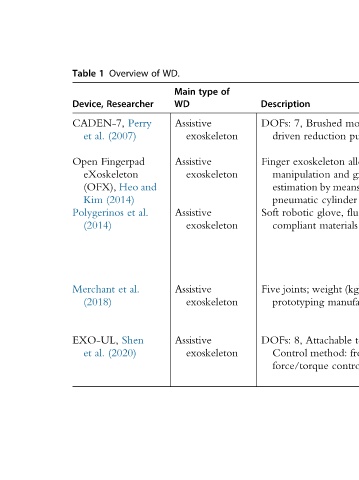
Remarks
motors inertias low motion, of range Full Strength: cable- with mechanisms, cable of Hysteresis Weakness: pulleys feedback sensory no test, clinical no human direct to due Dexterity Strength: fingertip free allowing interaction environment fingertip force grasping sensory no Noncompliant,
Brushed reduction exoskeleton and by cylinder glove, materials weight Attachable method:
Description 7, DOFs: driven Finger manipulation estimation pneumatic robotic Soft compliant joints; Five prototyping 8, DOFs: Control force/torque
of
type exoskeleton exoskeleton exoskeleton exoskeleton exoskeleton
Main WD Assistive Assistive Assistive Assistive Assistive
WD.
of and al.
Overview Researcher Perry (2007) Fingerpad Heo (2014) et al. et Shen (2020)
1 CADEN-7, al. eXoskeleton (OFX), Kim Polygerinos (2014) Merchant (2018) EXO-UL, al.
Table Device, et Open et