
Page 246 - Control Theory in Biomedical Engineering
P. 246
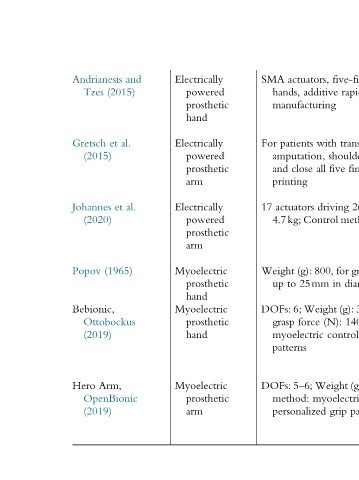
five-fingered fingertip design, Personalized Strength: prosthetic silent feedback, for sensors force prototyping rapid Weakness: Long time responses, bandwidth sensory no study, clinical no 0.2Hz, of feedback movements, thumb Independent Strength: limb transradial by tested $300, cost estimated open cont
actuators, additive manufacturing with patients amputation, all close driving actuators 4.7kg; Control 800, (g): 25mm to Weight 6; (N): force myoelectric Weight 5–6; method: personalized
SMA hands, For and printing 17 Weight up DOFs: grasp patterns DOFs:
Electrically powered prosthetic hand Electrically powered prosthetic arm Electrically powered prosthetic arm Myoelectric prosthetic hand Myoelectric prosthetic hand Myoelectric prosthetic arm
and (2015) al. al. et (1965)
Andrianesis Tzes et Gretsch (2015) Johannes (2020) Popov Bebionic, Ottobockus (2019) Arm, Hero OpenBionic (2019)