
Page 251 - Control Theory in Biomedical Engineering
P. 251
no
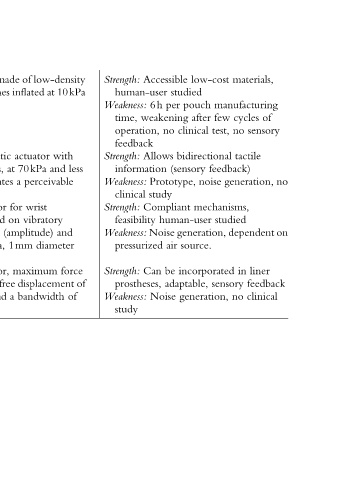
materials, manufacturing of cycles sensory no tactile generation, dependent on liner in feedback clinical no
low-cost pouch few after test, clinical bidirectional feedback) (sensory noise mechanisms, studied generation, source. incorporated sensory generation,
Accessible studied per 6h weakening no Allows Prototype, study Compliant human-user Noise air be Can adaptable, Noise
Strength: human-user Weakness: time, operation, feedback Strength: information Weakness: clinical Strength: feasibility Weakness: pressurized Strength: prostheses, Weakness: study
low-density 10kPa at with less and perceivable vibratory and diameter force of displacement of
of inflated actuator 70kPa a wrist (amplitude) 1mm maximum bandwidth
made at for on free a and
robot pouches pneumatic sensors, generates it actuator based 0.5mm 35kPa, at actuator, 70kPa, 50kPa
pneumatic polyethylene, LPM 1.5 soft piezoelectric 90Hz amplitude pneumatic proprioception stimulation, 20–120Hz actuator pneumatic at 12.5N at 4.5mm
Soft and Vibratory than Soft each Soft of 70Hz
Sensory feedback Sensory feedback Sensory feedback Sensory feedback
al. al.
et Paik et al. et
HapWRAP, Agharese (2018) and Sonar (2016) Georgarakis (2017) Huaroto (2018)