
Page 248 - Control Theory in Biomedical Engineering
P. 248
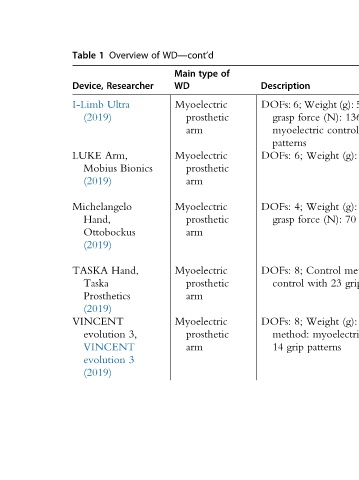
Remarks
(g): dexterity available, Commercially Strength: Maximum 507–515; method: Control 136; (N): grip 24 with control sensory available, Commercially Strength: 1400 (g): training VR feedback, foot by Controlled Weakness: movements clinical available, Commercially Strength: Maximum 420; (g): fingers abductio
Weight force Weight Weight force Control with Weight patterns
Description 6; DOFs: grasp myoelectric patterns 6; DOFs: 4; DOFs: grasp 8; DOFs: control 8; DOFs: method: grip 14
of type
WD—cont’d Main WD Myoelectric prosthetic arm Myoelectric prosthetic arm Myoelectric prosthetic arm Myoelectric prosthetic arm Myoelectric prosthetic arm
of
Overview Researcher Ultra Arm, Bionics Hand, 3, 3
1 (2019) Mobius (2019) Michelangelo Hand, Ottobockus (2019) Taska Prosthetics (2019) VINCENT evolution VINCENT evolution (2019)
Table Device, I-Limb LUKE TASKA