
Page 250 - Control Theory in Biomedical Engineering
P. 250
robot materials, low-cost Accessible Strength: low-density of made studied human-user 10kPa at inflated pouches manufacturing pouch per 6h Weakness: of cycles few after weakening time, sensory no test, clinical no operation, feedback tactile bidirectional Allows Strength: with actuator pneumatic fee
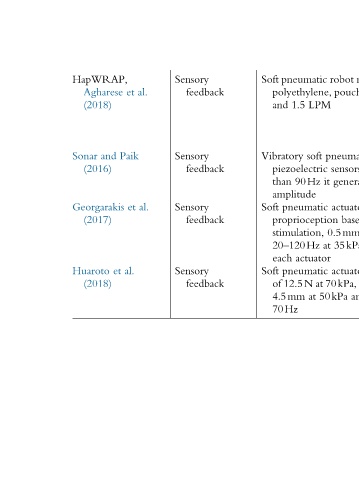
pneumatic polyethylene, LPM 1.5 soft piezoelectric 90Hz amplitude pneumatic proprioception stimulation, 20–120Hz actuator pneumatic at 12.5N at 4.5mm
Soft and Vibratory than Soft each Soft of 70Hz
Sensory feedback Sensory feedback Sensory feedback Sensory feedback
al. al.
et Paik et al. et
HapWRAP, Agharese (2018) and Sonar (2016) Georgarakis (2017) Huaroto (2018)