
Page 244 - Control Theory in Biomedical Engineering
P. 244
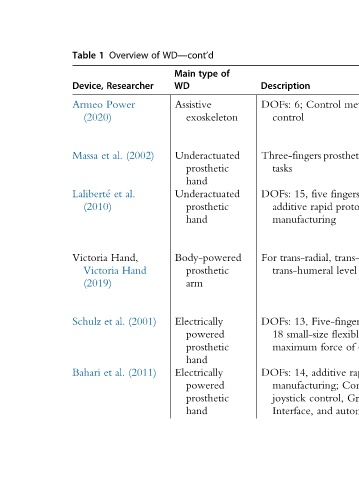
Remarks
Control robust available, Commercially Strength: impedance method: study clinical control, of range shoulder Limited Weakness: feedback sensory no motion, Underactuated Strength: grasping for robot prosthetic clinical no Noncompliant, Weakness: feedback sensory no study, thumb Out-of-the-plane Str
Description 6; DOFs: control Three-fingers tasks 15, DOFs: additive manufacturing For trans-humeral 13, DOFs: 18 maximum 14, DOFs: joystick Interface,
of type exoskeleton Body-powered
WD—cont’d Main WD Assistive Underactuated prosthetic hand Underactuated prosthetic hand prosthetic arm Electrically powered prosthetic hand Electrically powered prosthetic hand
of (2001) (2011)
Overview Researcher Power (2002) al. al. et Hand, Hand al. al.
1 (2020) et e (2010) Victoria (2019) et et
Table Device, Armeo Massa Lalibert Victoria Schulz Bahari