
Page 455 - Dynamics of Mechanical Systems
P. 455
0593_C12_fm Page 436 Monday, May 6, 2002 3:11 PM
436 Dynamics of Mechanical Systems
References
12.1. Kane, T. R., Dynamics of nonholonomic systems, J. Appl. Mech., 28, 574, 1961.
12.2. Kane, T. R., Dynamics, Holt, Rinehart & Winston, New York, 1968, p. 177.
12.3. Huston, R. L., and Passerello, C. E., On Lagrange’s form of d’Alembert’s principle, Matrix
Tensor Q, 23, 109, 1973.
12.4. Papastavridis, J. G., On the nonlinear Appell’s equations and the determination of generalized
reaction forces, Int. J. Eng. Sci., 26(6), 609, 1988.
12.5. Huston, R. L., Multibody dynamics: modeling and analysis methods [feature article], Appl.
Mech. Rev., 44(3), 109, 1991.
12.6. Huston, R. L., Multibody dynamics formulations via Kane’s equations, in Mechanics and Control
of Large Flexible Structures, J. L. Jenkins, Ed., Vol. 129 of Progress in Aeronautics and Astronautics,
American Institute of Aeronautics and Astronautics (AIAA), 1990, p. 71.
12.7. Huston, R. L., and Passerello, C. E., Another look at nonholonomic systems, J. Appl. Mech., 40,
101, 1973.
12.8. Kane, T. R., and Levinson, D. A., Dynamics, Theory, and Applications, McGraw-Hill, New York,
1985, p. 100.
Problems
Section 12.2 Kane’s Equations
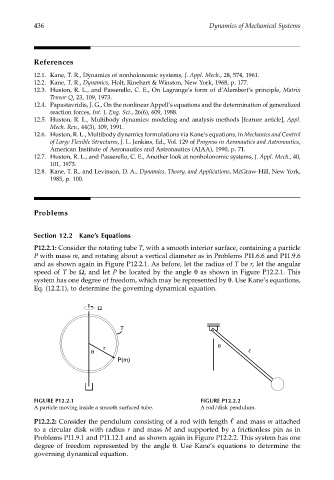
P12.2.1: Consider the rotating tube T, with a smooth interior surface, containing a particle
P with mass m, and rotating about a vertical diameter as in Problems P11.6.6 and P11.9.6
and as shown again in Figure P12.2.1. As before, let the radius of T be r, let the angular
speed of T be Ω, and let P be located by the angle θ as shown in Figure P12.2.1. This
system has one degree of freedom, which may be represented by θ. Use Kane’s equations,
Eq. (12.2.1), to determine the governing dynamical equation.
Ω
T
θ
r
θ
P(m)
FIGURE P12.2.1 FIGURE P12.2.2
A particle moving inside a smooth surfaced tube. A rod/disk pendulum.
P12.2.2: Consider the pendulum consisting of a rod with length and mass m attached
to a circular disk with radius r and mass M and supported by a frictionless pin as in
Problems P11.9.1 and P11.12.1 and as shown again in Figure P12.2.2. This system has one
degree of freedom represented by the angle θ. Use Kane’s equations to determine the
governing dynamical equation.