
Page 692 - Engineering Digital Design
P. 692
660 CHAPTER 13 / ALTERNATIVE SYNCHRONOUS FSM ARCHITECTURES
DECDLYit if MNDLY- HOLD
STDLYiT
CNT-HALT
MXDLY"
STEPIT
LDDLYit
INCDLYit if MXDLY- HOLD
I MX
CNT-GO
Vk
STDLYiT
CNT-GO
CNT
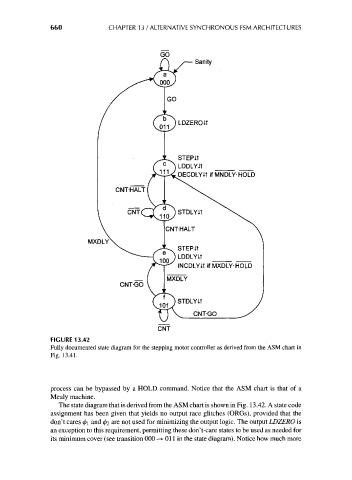
FIGURE 13.42
Fully documented state diagram for the stepping motor controller as derived from the ASM chart in
Fig. 13.41.
process can be bypassed by a HOLD command. Notice that the ASM chart is that of a
Mealy machine.
The state diagram that is derived from the ASM chart is shown in Fig. 13.42. A state code
assignment has been given that yields no output race glitches (ORGs), provided that the
don't cares (j>\ and fa are not used for minimizing the output logic. The output LDZERO is
an exception to this requirement, permitting these don't-care states to be used as needed for
its minimum cover (see transition 000 —> 011 in the state diagram). Notice how much more