
Page 697 - Engineering Digital Design
P. 697
P-terms
FIGURE 13.44
A-MAXDLY
C
BC
A-GO
C-CNT-GO
B-CNT
B • HALT
ABC
B
AC
ABC • MXDLY
BC-CNTHALT
BC-GO
BC-CNT
ABC • MNDLY • HOLD
ABC • MXDLY • HOLD
ABC
ABC
ABC
»8
0
A
-
-
-
-
-
-
-
0
1
-
-
1
1
1
1
1
1
1
'7
-
-
-
B
-
0
0
0
-
0
0
1
1
0
1
1
1
1
1
1
"I
•1
'a
0
1
C
-
0
1
1
0
1
0
0
1
1
1
_
's
-
-
_
-
-
0
-
0
_
-
-
-
-
_
_
-
-
>4
_
_
0
0
_
I,
_
-
-
o
-
_
Q
_
-
_
-
_
PLA Inputs
1
1
MNDLY* MXDLY* CNT
_
-
'2
1
1
1
GO
^_
_
o
"1
0
** Indicates an active low output-must use an inverter on the output.
_
I 0
0
0
HALT HOLD
D
0
0
1
0
0
0
0
0
0
0
0
1
0
1
0
0
0
0
0
A
Y 7
* Indicates an active low input—complement column or use an inverter on the input.
0
0
0
0
0
0
0
0
0
1
0
0
1
0
0
0
1
Y 6
1
1
D
D R
w
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
1
Lf
1
1
1
D r
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
Y 4
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
Y 3
LUULY
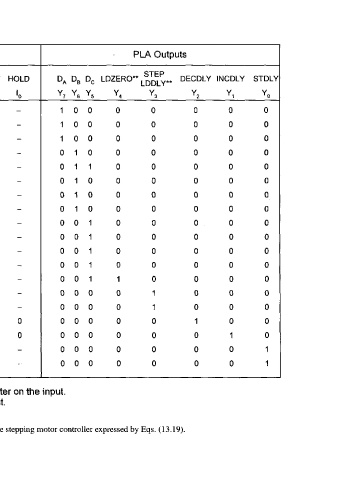
P-term table for the PLA implementation of the NS and output functions of the stepping motor controller expressed by Eqs. (13.19).
PLA Outputs
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
Y 2
LDZERO ** . ?L E v** DECDLY
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Y,
1
INCDLY
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Y o
1
1
STDLY