
Page 695 - Engineering Digital Design
P. 695
NJ
\BC
0
0
\BC
0
0
AX 0°
0
*
AX
\BC
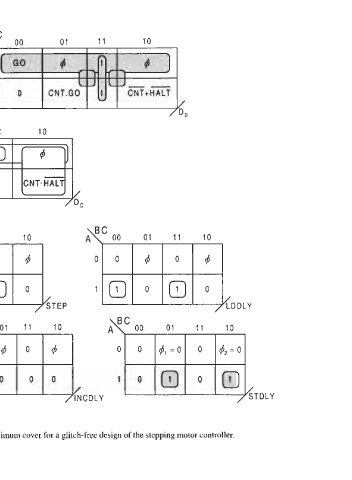
FIGURE 13.43
AX oo 01 _
0
01
0
u
00
[MXDLY
0
11
0
11 _
1 )
MNDLY-HOLD
1
01
10
0
0
/
0
^
10
1
1
11
AX
\BC
LDZERO
LJ — i
ri r
/DECDLY
A
0°
GO
AX
MXDLY
\BC
\BC
1
*
10
\ 0°
0
DA
01
oo
01
^~~
CNT+GO
MXDLY-HOLD
AX
11
11
0
\BC
0
^
1 — D
° 1
0
°0
10
GO
0
11
0
10
0
*
CNT-HALT
*
01
* I
A I
10
CNT.GO
/INCDLY
1
1
\BC
11
AX 0°
\BC
01
A\ o°
#
10
CNT+HALT
11
01
10
11
10
NS and output K-maps plotted from the state diagram in Fig. 13.42 showing minimum cover for a glitch-free design of the stepping motor controller.
STDLY