
Page 422 - Fundamentals of Radar Signal Processing
P. 422
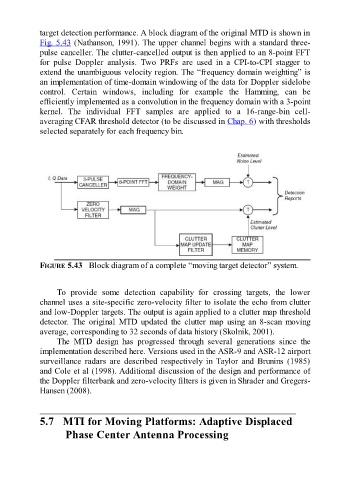
target detection performance. A block diagram of the original MTD is shown in
Fig. 5.43 (Nathanson, 1991). The upper channel begins with a standard three-
pulse canceller. The clutter-cancelled output is then applied to an 8-point FFT
for pulse Doppler analysis. Two PRFs are used in a CPI-to-CPI stagger to
extend the unambiguous velocity region. The “frequency domain weighting” is
an implementation of time-domain windowing of the data for Doppler sidelobe
control. Certain windows, including for example the Hamming, can be
efficiently implemented as a convolution in the frequency domain with a 3-point
kernel. The individual FFT samples are applied to a 16-range-bin cell-
averaging CFAR threshold detector (to be discussed in Chap. 6) with thresholds
selected separately for each frequency bin.
FIGURE 5.43 Block diagram of a complete “moving target detector” system.
To provide some detection capability for crossing targets, the lower
channel uses a site-specific zero-velocity filter to isolate the echo from clutter
and low-Doppler targets. The output is again applied to a clutter map threshold
detector. The original MTD updated the clutter map using an 8-scan moving
average, corresponding to 32 seconds of data history (Skolnik, 2001).
The MTD design has progressed through several generations since the
implementation described here. Versions used in the ASR-9 and ASR-12 airport
surveillance radars are described respectively in Taylor and Brunins (1985)
and Cole et al (1998). Additional discussion of the design and performance of
the Doppler filterbank and zero-velocity filters is given in Shrader and Gregers-
Hansen (2008).
5.7 MTI for Moving Platforms: Adaptive Displaced
Phase Center Antenna Processing