
Page 217 - Industrial Power Engineering and Applications Handbook
P. 217
Transmission of load and suitability of bearings 8/197
The power from the motor shaft to the driven shaft can
be transmitted in many ways, depending upon the power
and load application. In this chapter we deal with the
most common types of driving systems, their influence
on the starting characteristics of the motor and their effect
on bearings.
8.1 Direct or rigid couplings
These are suitable for smaller ratings only because of
their weight, which also includes the weight of the load
which falls directly onto the motor and its shaft. The
driven equipment, such as a mono block pump is mounted
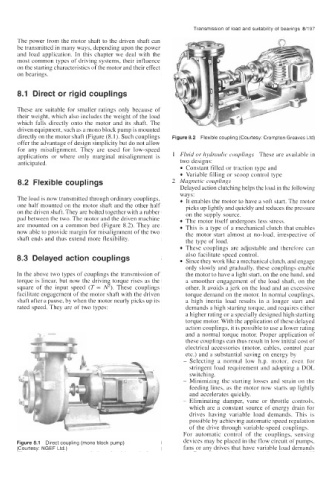
directly on the motor shaft (Figure (8.1). Such couplings Figure 8.2 Flexible coupling (Courtesy: Crompton Greaves Ltd)
offer the advantage of design simplicity but do not allow
for any misalignment. They are used for low-speed
applications or where only marginal misalignment is 1 Fluid or hydraulic couplings These are available in
anticipated. two designs:
0 Constant filled or traction type and
Variable filling or scoop control type
8.2 Flexible couplings 2 Magnetic couplings
Delayed action clutching helps the load in the following
wavs:
The load is now transmitted through ordinary couplings, fi enables the motor to have a soft start. The motor
one half mounted on the motor shaft and the other half picks up lightly and quickly and reduces the pressure
on the driven shaft. They are bolted together with a rubber on the supply source.
pad between the two. The motor and the driven machine The motor itself undergoes less stress.
are mounted on a common bed (Figure 8.2). They are This is a type of a mechanical clutch that enables
now able to provide margin for misalignment of the two the motor start almost at no-load, irrespective of
shaft ends and thus extend more flexibility. the type of load.
These couplings are adjustable and therefore can
8.3 Delayed action couplings also facilitate speed control.
Since they work like a mechanical clutch, and engage
only slowly and gradually, these couplings enable
In the above two types of couplings the transmission of the motor to have a light start, on the one hand, and
torque is linear, but now the drivin torque rises as the a smoother engagement of the load shaft, on the
5
square of the input speed (T = N ). These couplings other. It avoids a jerk on the load and an excessive
facilitate engagement of the motor shaft with the driven torque demand on the motor. In normal couplings,
shaft after a pause, by when the motor nearly picks up its a high inertia load results in a longer start and
rated speed. They are of two types: demands a high starting torque, and requires either
a higher rating or a specially designed high starting
torque motor. With the application of these delayed
action couplings, it is possible to use a lower rating
and a normal torque motor. Proper application of
these couplings can thus result in low initial cost of
electrical accessories (motor, cables, control gear
etc.) and a substantial saving on energy by
- Selecting a normal low h.p. motor, even for
stringent load requirement and adopting a DOL
switching.
- Minimizing the starting losses and strain on the
feeding lines, as the motor now starts up lightly
I and accelerates quickly.
- Eliminating damper, vane or throttle controls,
which are a constant source of energy drain for
drives having variable load demands. This is
possible by achieving automatic speed regulation
of the drive through variable-speed couplings.
For automatic control of the couplings, sensing
Figure 8.1 Direct coupling (mono block pump) devices may be placed in the flow circuit of pumps,
(Courtesy: NGEF Ltd.) fans or any drives that have variable load demands