
Page 205 - MATLAB an introduction with applications
P. 205
190 ——— MATLAB: An Introduction with Applications
Umez-Eronini, E., System Dynamics and Control, Brooks/Cole Publishing Company, Pacific Grove, CA,
1999.
Vu, H.V., Control Systems, McGraw-Hill Primis Custom Publishing, New York, NY, 2002.
Vukic, Z., Kuljaca, L., Donlagic, D. and Tesnjak, S., Nonlinear Control Systems, Marcel Dekker, Inc., New
York, NY, 2003.
Welbourn, D.B., Essentials of Control Theory, Edward Arnold, 1963.
Weyrick, R.C., Fundamentals of Automatic Control, McGraw-Hill, New York, NY, 1975.
PROBLEMS
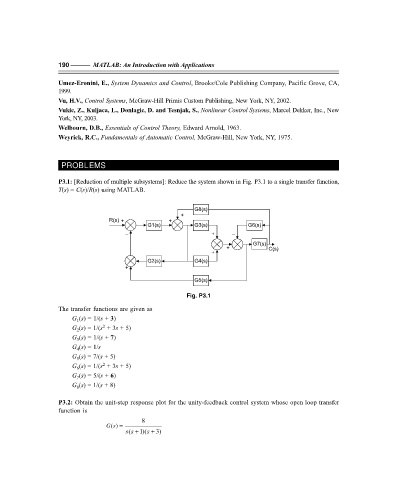
P3.1: [Reduction of multiple subsystems]: Reduce the system shown in Fig. P3.1 to a single transfer function,
T(s) = C(s)/R(s) using MATLAB.
G8(s)
+
R(s) + +
G1(s) G3(s) G6(s)
– + –
G7(s)
+ C(s)
+
G2(s) G4(s)
+
G5(s)
Fig. P3.1
The transfer functions are given as
G (s) = 1/(s + 3)
1
2
G (s) = 1/(s + 3s + 5)
2
G (s) = 1/(s + 7)
3
G (s) = 1/s
4
G (s) = 7/(s + 5)
5
2
G (s) = 1/(s + 3s + 5)
6
G (s) = 5/(s + 6)
7
G (s) = 1/(s + 8)
8
P3.2: Obtain the unit-step response plot for the unity-feedback control system whose open loop transfer
function is
8
() =
Gs
( ss + 1)(s + 3)
F:\Final Book\Sanjay\IIIrd Printout\Dt. 10-03-09