
Page 169 - MEMS Mechanical Sensors
P. 169
158 Force and Torque Sensors
Comb drive
Anchor actuators
i sense
V drive
F tf
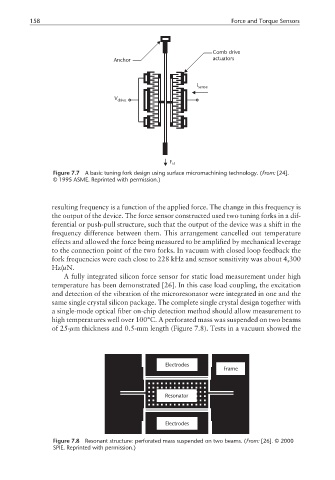
Figure 7.7 A basic tuning fork design using surface micromachining technology. (From: [24].
© 1995 ASME. Reprinted with permission.)
resulting frequency is a function of the applied force. The change in this frequency is
the output of the device. The force sensor constructed used two tuning forks in a dif-
ferential or push-pull structure, such that the output of the device was a shift in the
frequency difference between them. This arrangement cancelled out temperature
effects and allowed the force being measured to be amplified by mechanical leverage
to the connection point of the two forks. In vacuum with closed loop feedback the
fork frequencies were each close to 228 kHz and sensor sensitivity was about 4,300
Hz/µN.
A fully integrated silicon force sensor for static load measurement under high
temperature has been demonstrated [26]. In this case load coupling, the excitation
and detection of the vibration of the microresonator were integrated in one and the
same single crystal silicon package. The complete single crystal design together with
a single-mode optical fiber on-chip detection method should allow measurement to
high temperatures well over 100°C. A perforated mass was suspended on two beams
of 25-µm thickness and 0.5-mm length (Figure 7.8). Tests in a vacuum showed the
Electrodes
Frame
Resonator
Electrodes
Figure 7.8 Resonant structure: perforated mass suspended on two beams. (From: [26]. © 2000
SPIE. Reprinted with permission.)