
Page 208 - MEMS Mechanical Sensors
P. 208
8.3 Micromachined Gyroscopes 197
Table 8.3 (Continued)
Single axis (20G, Analog output; bandwidth 0 to 700 Hz;
50G), K-Beam noise floor 7 µG/√Hz (20G), 12 µG/√Hz
range (50G); resolution 100, 170 µG; sensitivity
100, 60 mV/G, supply voltage 15V to 28V,
bulk-micromachined sensing element
Single axis (2G), Analog output; bandwidth 0 to 2 kHz; Employs analog electrostatic feedback.
ServoK-Beam noise floor 0.8 µG/√Hz; resolution 2.5G;
sensitivity 1.5 V/G; supply voltage 6V to
15V; bulk-micromachined sensing element
Motorola Single axis (1.5G Ratiometric output; bandwidth from 50 to Appr. cost: $8
(http://www.motorola.com) to 250G) 400 Hz; noise floor 110 G/vHz; sensitivity
Dual axis (38G) from 1.2 V/G (1.5G) to 8 mV/G (250G);
supply voltage 5V; surface-micromachined
sensing element
Bandwidth 400 Hz; sensitivity 50 mV/G
Sensornor Single axis (50G, Ratiometric analog output; bandwidth 400 Piezoresistive detection, for airbag
(http://sensornor.com) 100G, 250G) Hz; sensitivity 20 mV/G; supply voltage applications
5V to 11V
Dual axis (50G) Ratiometric analog output; bandwidth 400
Hz; resolution 0.02G; sensitivity 40 mV/G;
supply voltage 5V; bulk-micromachined
sensing element
STMicroelectronics Dual axis (2G, Analog output; bandwidth 0 to 4 kHz; For handheld gamepad devices
(http://st.com) 6G) noise floor 50 µG/√Hz; sensitivity 1 V/G;
supply voltage 5V
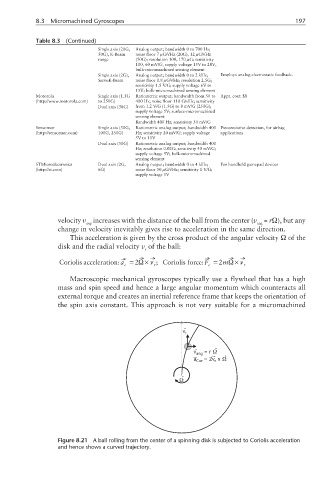
velocity υ increases with the distance of the ball from the center (v = rΩ), but any
ang ang
change in velocity inevitably gives rise to acceleration in the same direction.
This acceleration is given by the cross product of the angular velocity Ω of the
disk and the radial velocity v of the ball:
r
→ →→ → →→
Coriolis acceleration: a =2Ω ×ν r ; Coriolis force: F =2mΩ ×ν r
c
c
Macroscopic mechanical gyroscopes typically use a flywheel that has a high
mass and spin speed and hence a large angular momentum which counteracts all
external torque and creates an inertial reference frame that keeps the orientation of
the spin axis constant. This approach is not very suitable for a micromachined
v r
v ang = r Ω
a Cor = 2v x Ω
r
Ω
Figure 8.21 A ball rolling from the center of a spinning disk is subjected to Coriolis acceleration
and hence shows a curved trajectory.