
Page 218 - MEMS Mechanical Sensors
P. 218
8.4 Future Inertial Micromachined Sensors 207
Levitation using magnetic forces has been investigated by Shearwood et al. [72,
73], who successfully demonstrated a gyroscope based on this approach. The elec-
tromagnetic forces are produced by currents up to 1A, which precludes the use of
standard integrated electronics, which is a severe disadvantage of this approach. A
more promising approach is to use electrostatic forces to levitate and spin a disk.
Fukatsu et al. [74] have developed a prototype of such a device and have demon-
strated the feasibility of using it for simultaneously detecting linear and angular
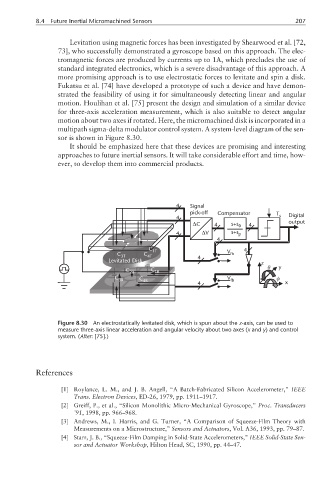
motion. Houlihan et al. [75] present the design and simulation of a similar device
for three-axis acceleration measurement, which is also suitable to detect angular
motion about two axes if rotated. Here, the micromachined disk is incorporated in a
multipath sigma-delta modulator control system. A system-level diagram of the sen-
sor is shown in Figure 8.30.
It should be emphasized here that these devices are promising and interesting
approaches to future inertial sensors. It will take considerable effort and time, how-
ever, to develop them into commercial products.
4 Signal
pick-off Compensator T
4 s Digital
∆C 4 s+s 0 4 output
4 ∆V s+s p
4
C 1T
1T
C C C 2T C C C 1T 4
C 2T
2T
2T
C 3T C 4T 1T V fb
Levitated Disk 4 z
C 2B
C 2B C 2B C 1B θ y
C 4B
C C 3B C 4B V φ
C 3B
3B C 4B fb
4 x
Figure 8.30 An electrostatically levitated disk, which is spun about the z-axis, can be used to
measure three-axis linear acceleration and angular velocity about two axes (x and y) and control
system. (After: [75].)
References
[1] Roylance, L. M., and J. B. Angell, “A Batch-Fabricated Silicon Accelerometer,” IEEE
Trans. Electron Devices, ED-26, 1979, pp. 1911–1917.
[2] Greiff, P., et al., “Silicon Monolithic Micro-Mechanical Gyroscope,” Proc. Transducers
’91, 1998, pp. 966–968.
[3] Andrews, M., I. Harris, and G. Turner, “A Comparison of Squeeze-Film Theory with
Measurements on a Microstructure,” Sensors and Actuators, Vol. A36, 1993, pp. 79–87.
[4] Starr, J. B., “Squeeze-Film Damping in Solid-State Accelerometers,” IEEE Solid-State Sen-
sor and Actuator Workshop, Hilton Head, SC, 1990, pp. 44–47.